地震定位是天然和诱发地震监测和预警的一个基本任务。地震定位算法通常分为两类:基于到时的定位和基于全波形偏移的定位。这两类定位方法都需要事先收集多个台站监测到的数据。但是对于实时地震应用如地震早期预警,需要地震的定位随着更多监测台站的触发而实时更新地震位置及其误差。但是传统的基于到时和波形的地震定位方法不满足这样的需求。为此,中国科学技术大学地球和空间科学学院、地震与地球内部物理实验室、科技部蒙城野外观测站张海江教授研究组与加拿大卡尔加里大学David Eaton教授合作,发展了一种基于卡尔曼滤波的实时地震定位算法。论文以“Real‐Time Earthquake Location Based on the Kalman Filter Formulation”为题于2020年6月1日在线发表在国际地球物理权威期刊《Geophysical Research Letters》。
新的实时地震定位算法把基于地震震相到时的线性地震定位算法表示为信号处理中常用的卡尔曼滤波系统,可以实现当一个新的台站被触发后,地震的位置和发震时刻及对应的不确定性可以实时地进行估算。实时地震定位的初始地震位置假定为第一个触发的地震台站。新的算法利用合成地震数据以及美国加州Parkfield地区发生的地震进行了有效性测试。结果显示,利用4至5个地震台站就可以较为可靠地实时估算地震的位置。实际数据的测试表明在不考虑台站延迟的情况下,2003年San Simeon Mw6.6 地震和2004 Parkfield Mw6.0地震分别在地震发生后的3.3秒和2.7秒 就可以可靠地估计出他们的位置和误差。与现有的实时地震定位算法相比,基于卡尔曼滤波的实时地震定位算法效率更高并且可以实时估算定位误差。
本研究第一作者是陈余宽博士,2019年毕业后继续去新加坡南洋理工从事博士后研究工作,通讯作者是张海江教授。这项工作得到了科技部、国家自然科学基金委和国家留学基金委的支持。
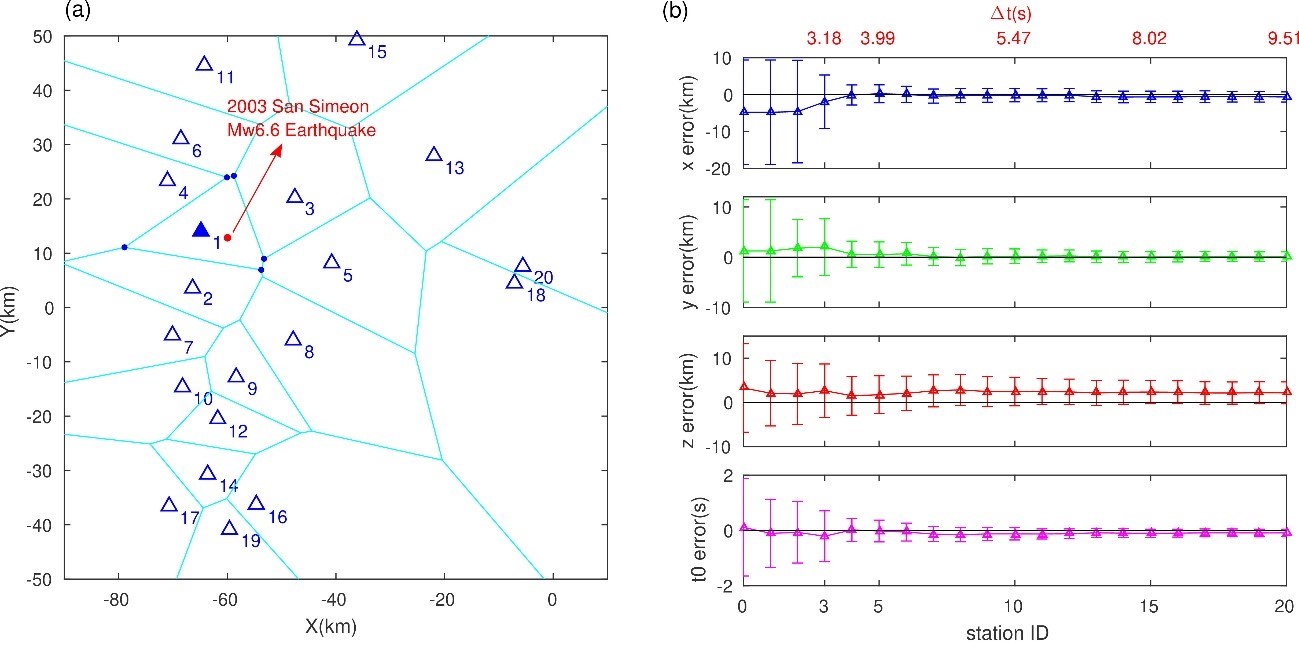
基于卡尔曼滤波的实时地震定位算法应用于美国加州2003年San Simeon Mw6.6 地震的测试。(a)依次触发的地震台站分布,标号为触发的顺序;(b)对应于触发台站次序的地震发震时刻和在三个方向定位的误差。
论文链接:https://agupubs.onlinelibrary.wiley.com/doi/10.1029/2019GL086240
参考文献:
Chen, Yukuan, Haijiang Zhang*, David W. Eaton (2020), Real-time earthquake location based on the Kalman filter formulation. Geophysical Research Letters, 46, e2019GL086240. https://doi.org/10.1029/2019GL086240.